




Když geometrie nahradí složitý software
Běžné robotické klouby se obvykle spoléhají na standardní ložiska a složité programování, které musí každý pohyb pracně korigovat. Harvardský tým však přenesl část této „inteligence“ přímo do mechanické konstrukce. Namísto jednoduchých kruhových prvků využívají nepravidelně zakřivené povrchy a pružné spoje, které jsou vytvarovány přesně pro daný úkol.
Díky tomu, že je trajektorie pohybu definována samotnou geometrií kloubu, se výrazně snižuje tření i mechanické opotřebení. Pro roboty to v praxi znamená nižší spotřebu energie a možnost používat menší a lehčí motory. Software se tak může soustředit na vyšší úroveň řízení, zatímco o samotnou plynulost pohybu se postará hardware.
Mohlo by vás zajímat
Revoluční koleno a silnější úchop
Schopnosti nové metody vědci demonstrovali na dvou prototypech. Prvním je model kolenního kloubu, který věrně kopíruje pohyb lidské nohy. V ní se totiž kosti nejen otáčejí, ale zároveň po sobě kloužou a valí se. Výsledek testování ukázal, že tento optimalizovaný kloub snížil riziko nesprávného pohybu o neuvěřitelných 99 % ve srovnání s běžnými mechanismy. To je klíčové především pro medicínu, protože právě nepřesný pohyb u současných ortéz nebo exoskeletů často způsobuje pacientům nepohodlí a bolest.
Druhým příkladem je robotický uchopovač (gripper) se dvěma prsty. Klouby tohoto úchopového mechanismu byly navrženy tak, aby maximalizovaly sílu v momentě sevření objektu. Díky této úpravě dokáže gripper unést více než trojnásobek hmotnosti oproti standardním verzím, aniž by k tomu potřeboval výkonnější motor.
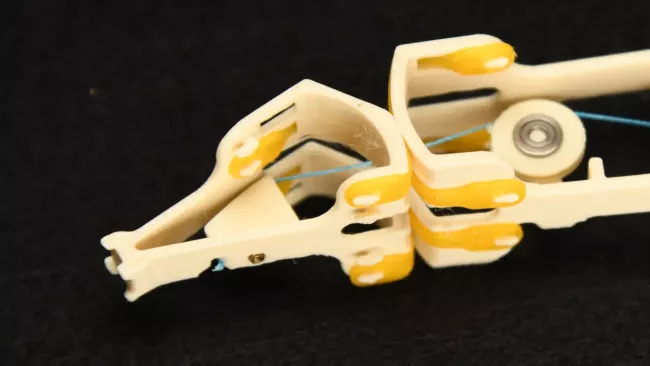
Zdroj: Wood Lab/Harvard SEAS

Zdroj: Wood Lab/Harvard SEAS
Budoucnost personalizované medicíny a plynulého pohybu
Tato technologie otevírá dveře k nové generaci robotů, kteří se budou pohybovat stejně ladně jako živí tvorové. Významný dopad se očekává také v ortopedii a protetice. Možnost navrhnout kloub přesně podle specifické trajektorie pohybu totiž dovolí výrobu kloubních náhrad a protéz na míru konkrétnímu pacientovi.
Cílem vědců je zkrátka odlehčit digitálnímu řízení tím, že maximum práce svěří chytrému designu a fyzikálním vlastnostem použitých materiálů.
Zdroj: Harvard SEAS, TechXplore, Becker’s Spine Review
Zdroj:
Harvard John A. Paulson School of Engineering and Applied Sciences/YouTube





